4.6.5 优化算法对比与使用建议
这里引用一下特斯拉人工智能主管 安德烈·卡尔帕蒂(Andrej Karpathy) 的 在线 Demo(使用的是 pytouch) ,来做一下演示。
我们需要将脚本改成如下(增加 Adam):
// lets use an example fully-connected 2-layer ReLU net
var layer_defs = [];
layer_defs.push({type:'input', out_sx:24, out_sy:24, out_depth:1});
layer_defs.push({type:'fc', num_neurons:20, activation:'relu'});
layer_defs.push({type:'fc', num_neurons:20, activation:'relu'});
layer_defs.push({type:'softmax', num_classes:10});
// below fill out the trainer specs you wish to evaluate, and give them names for legend
var LR = 0.01; // learning rate
var BS = 8; // batch size
var L2 = 0.001; // L2 weight decay
nets = [];
trainer_defs = [];
trainer_defs.push({learning_rate:10*LR, method: 'sgd', momentum: 0.0, batch_size:BS, l2_decay:L2});
trainer_defs.push({learning_rate:LR, method: 'sgd', momentum: 0.9, batch_size:BS, l2_decay:L2});
trainer_defs.push({learning_rate:LR, method: 'nesterov', momentum: 0.9, batch_size:BS, l2_decay:L2});
trainer_defs.push({learning_rate:LR, method: 'adagrad', eps: 1e-6, batch_size:BS, l2_decay:L2});
trainer_defs.push({learning_rate:1.0, method: 'adadelta', eps: 1e-6, ro:0.95, batch_size:BS, l2_decay:L2});
trainer_defs.push({learning_rate:LR, method: 'adam', eps: 1e-6, betas:[0.9, 0.999], batch_size:BS, l2_decay:L2});
// names for all trainers above
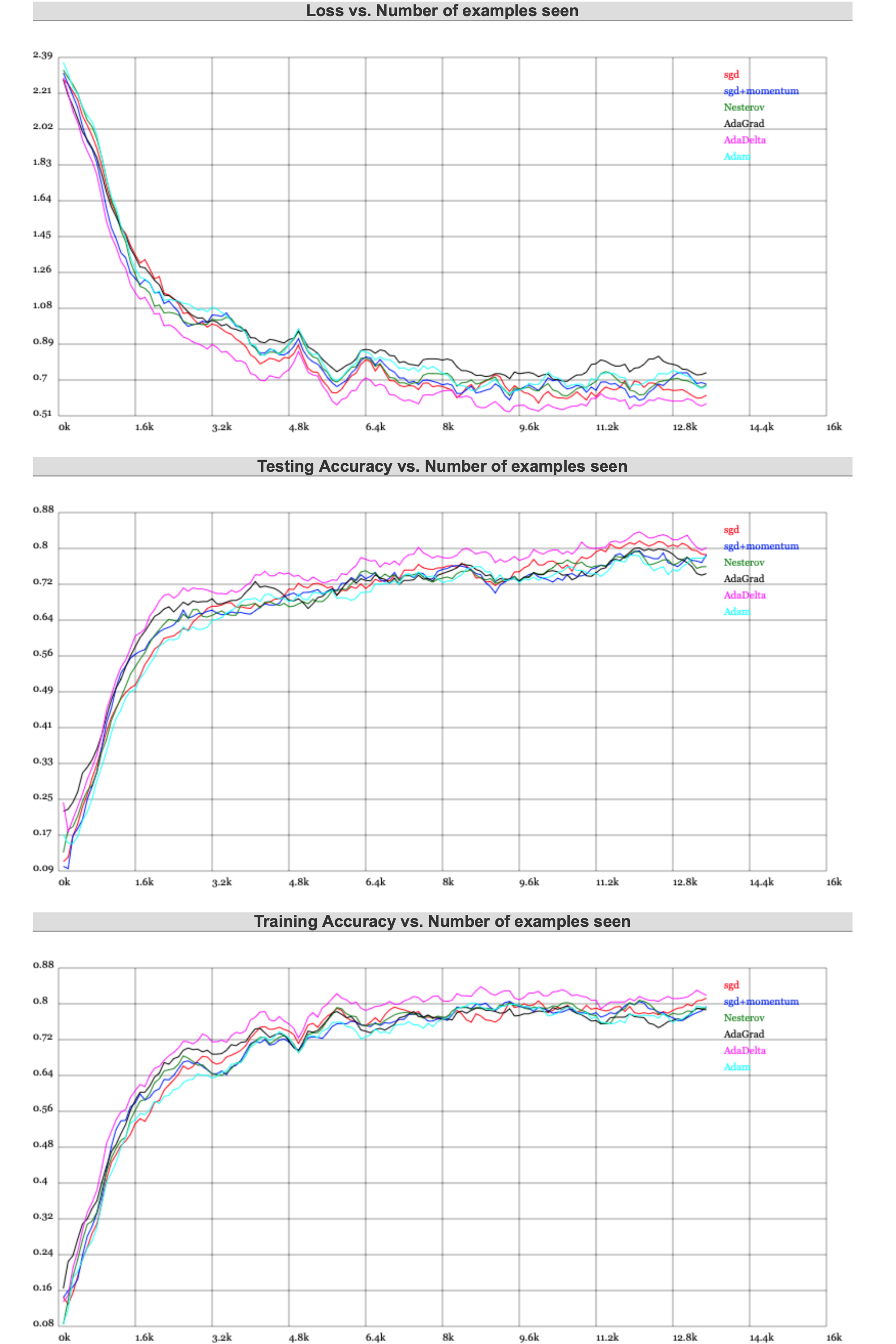
legend = ['sgd', 'sgd+momentum', 'Nesterov', 'AdaGrad', 'AdaDelta', 'Adam'];
在运行一小段时间后(大概 11 k 经处理样本左右),有如下的结果:
感兴趣的读者,可以自行前往地址:
https://cs.stanford.edu/people/karpathy/convnetjs/demo/trainers.html
观看更为直观的展示。
通过对比,我们也发现了问题。针对震荡优化的几个算法,在速度上不太有优势;而针对强弱重点的算法,又不是太稳定。
但 Adam 综合表现始终良好,证明了其优秀的可用性。
至此,我们可以得出大致结论:
如果数据稠密,实际上简单的算法就能得到鲁棒性很好的结果。参考使用 标准动量 的 SGD/BGD/MBGD + Momentum 。加动量既可以保证相对快的训练速度,也可以一定程度避免局部最小值。
如果数据稀疏,因为需要对关键特征点进行提取,所以需要用一些自适应算法。对于简单凸性和相对不复杂的数据,可以采用 L1、L2正则化 + 组合分桶。而复杂一些的,就需要采用Adagrad, Adadelta, RMSprop, Adam 等方式了。
如果关键参数更多的出现在运算后期,即梯度稀疏一定程度后,则Adam 比 RMSprop 效果会好。这时 Adam 明显是最好的选择。
按照这样的策略,灵活且合理的选取优化器。