3.3.1 方向梯度直方图(HOG [Histogram of Oriented Gradient])
在前文中,我们提到了索贝尔滤波(Sobel Filter)卷积核对中心点周边方向信息的提炼,可以被用来获取方向梯度直方图的梯度矢量计算中。那么什么是方向梯度直方图呢?
方向梯度直方图最早的 概念原型(Prototype) 来自于 罗伯特·麦康纳尔(Robert K. McConnell) 在 1986 年申请的有关模式识别专利中,对 视野(FoV [Field of View]) 方向性输入产生输出结果差异的判断过程。并于 1994 年 三菱电子研究实验室(Mitsubishi Electric Research Laboratories) 在手势识别应用的区域检测过程中,首次总结为当前称谓 [16] 。最终经过 2005 年 CVPR 顶会参会论文验证,重新确认了 HOG 在动态检测上的高适配度,才开始被人熟知 [17] 。
方向梯度直方图(HOG [Histogram of Oriented Gradient]) 是对用于提炼并描述区域范围内像素漂移情况方法论的概念抽象。是对过程的抽象,而非对结果的抽象。由于本身最终运算能够表示为处理单元形式,因而属于 特征描述算子(Feature Descriptor) 的一种。整体思想则是在单元间隔均匀的卷积核内,使用重叠的局部梯度提炼算法并 录表统计归一化(Normalization),以取得中心点变化方向矢量。方法常结合 阈值限定(Thresholding) 筛选结果,提高运动预测的准确度。
显然,方向梯度直方图并不只适用于索贝尔, 只要能够提供中心点周边梯度变化的大小和方向的算子,都可以被应用于 HOG 的求解中。一个方向梯度直方图是否优秀,最大的影响点就在于梯度提炼的是否精准。
HOG 的标准处理流
HOG 有一套相对固定的标准过程的。基本可以按照如下顺序进行:
- 数据优化,通过滤波算法(如高斯滤波),减少干扰信息并增强灰度(光亮度)对比;
- 梯度计算,通过梯度滤波器(如索贝尔滤波)提取图像每个像素的梯度矢量;
- 分组抽象,指定梯度矢量采样卷积核范围,即分组(Cell)
- 矢量合并,将分组内所有像素的梯度矢量,以方向投票统计合并权重,获取 HOG
- 块归一化,指定块大小(由分组为单位),整合 HOG 统计结果并归一化快内分组权重
五个步骤,共同构成了方向梯度直方图方法论本身。 且四五两步概念不同,但密不可分。
数据优化
数据优化的目的是为了增强光亮度变化差异,并减少干扰噪声,从而更好的保存并放大像素梯度变化情况。我们记原信号为 ,记经过滤波降噪和修饰后的灰度(光亮度)数据为 。从 到 的处理过程就不再赘述(见滤波,类比处理)。记经过优化函数 处理,以 获取的优化结果为 。那么,相对简单的处理方式,就是直接对 进行 伽马矫正(Gamma Correction)来得到 。取伽马因子为 ,矫正系数(Adjust Factor)为 (一般情况 为常量),有:
伽马矫正(Gamma Correction) 本是用于应对,早期 阴极射线管(CRT [Cathode Ray Tube])显示器 的电子偏转特征,引入的采样源数据非线性转换算法。传统的 CRT 显示器在显示时就会完成对偏转数据的自然逆向过程,而在 液晶显示器(LCD [Liquid Crystal Display]) 上,则需要 主动的实现这一反向运算,否则会面临数据亮度过爆的问题。
由于采样时采用 应用于数据修正, 所以 时的 值被称为 编码伽马值(Encoding Gamma)。相应的, 时的 值被称为 解码伽马值(Decoding Gamma)。而采样到还原的过程中,对伽马矫正的不同运用被分别称为 伽马编码(Gamma Encode) 和 伽马解码(Gamma Decode)。
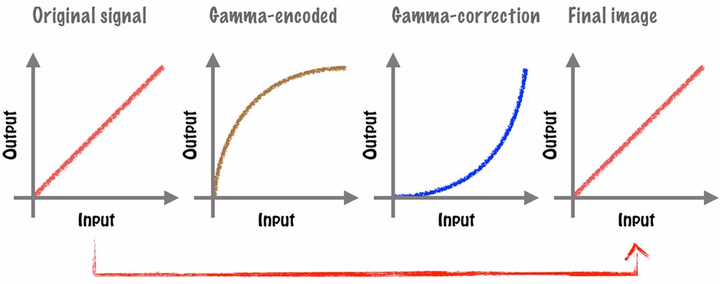
图 3-4 原数据经过伽马编解码(伽马矫正)的还原过程示意图
伽马矫正本身的作用正是针对原图色彩通道数据,进行非线性的映射。衍生为对图片整体光亮度的调节,因此在灰度值上的体现最为明显。我们利用这种特性,来增强图片的对比信息,放大像素梯度变化。
这一步,通常取用 区间内的值,或 的原论文推荐值来进行修正。得到用于后续处理的灰度数据源 。
梯度计算
在经过优化得到高对比度的 灰度(光亮度)图 后,就可以利用一些方向梯度卷积核算法,来计算每一个像素点光亮度变换的梯度矢量了。
此时应用边缘检测索贝尔滤波,目的同 HOG 的默认设定中,采用横纵方向均取 单一中线 的简化 普雷维特算子(Prewitt Operator),以求取梯度 方向(Orientate) 和 强度(Magnitude) 的作用一致。显然,并不只有索贝尔算法或普雷维特算法,适用于方向梯度直方图中梯度矢量的计算。只要能够提供中心点周边梯度变化的大小和方向的算子,都可以被应用于 HOG 的此步的求解计算中。
我们记方向为 ,强度为 ,横向 轴方向的滤波核函数 ,纵向 轴方向的滤波核函数 。强度系数 为同态值 $ 。此处不含推导展示结论。
记 边缘检测普雷维特滤波核函数 为 ,有:
记 边缘检测索贝尔滤波核函数 为 ,有:
更明确的,当我们采用不同算法进行梯度计算时,梯度提炼的结果,将会在较大程度上影响最终得到的方向梯度直方图。是需要更准确、更快捷,还是需要高抗性、低波动,应以实际工程角度考量。根据具体需要来采用不同的边缘检测算法。
而梯度方向和强度的计算则可统一为共识:
称为 通用卷积核梯度矢量公式(Formula of Kernel Gradient Vector)。
经过此步计算后,灰度数据源 的输入就被转换为原信号为 的所有像素点,梯度方向数据集 和 梯度强度数据集 。不过此时的数据量相对较大,不便于计算处理,还需 简化信息量。
分组抽象 & 矢量合并
分组抽象的目的是为了提炼每个像素点的数据,汇总分组内逐个像素特征到分组整体的单元特征。 由于原有梯度方向的平面完整性,以 范围即便只限定为整数角,也包含 共 个取值。 这样造成的数据膨胀,不利于有限算力的处理。 因此,以尽可能不损失方向包含实际意义为前提, 将角度按照权重分割 来表示原梯度包含信息,是个不错的办法。
假设我们将 按照 的边界角度,拆分为 个指定方向。记存在像素点 的梯度 的方向落于角度区间 内,有:
其中 ,按照权重 、 即可拆分 数据到 、 角度分量混合表示。记两个角度方向的分量分别为 、 ,则:
显然,以 指定方向的矢量合形式表示, 除了 、 角度外,其余角度分量为 , 有:
由于不需要考虑反向的数据还原,核内采样按照 的边界角度的方向矢量合形式求和,即可完成分组内的特征整合。记得到分组的 维特征向量 ,则:
那么现在的问题就是如何分组,或者分为几组了。
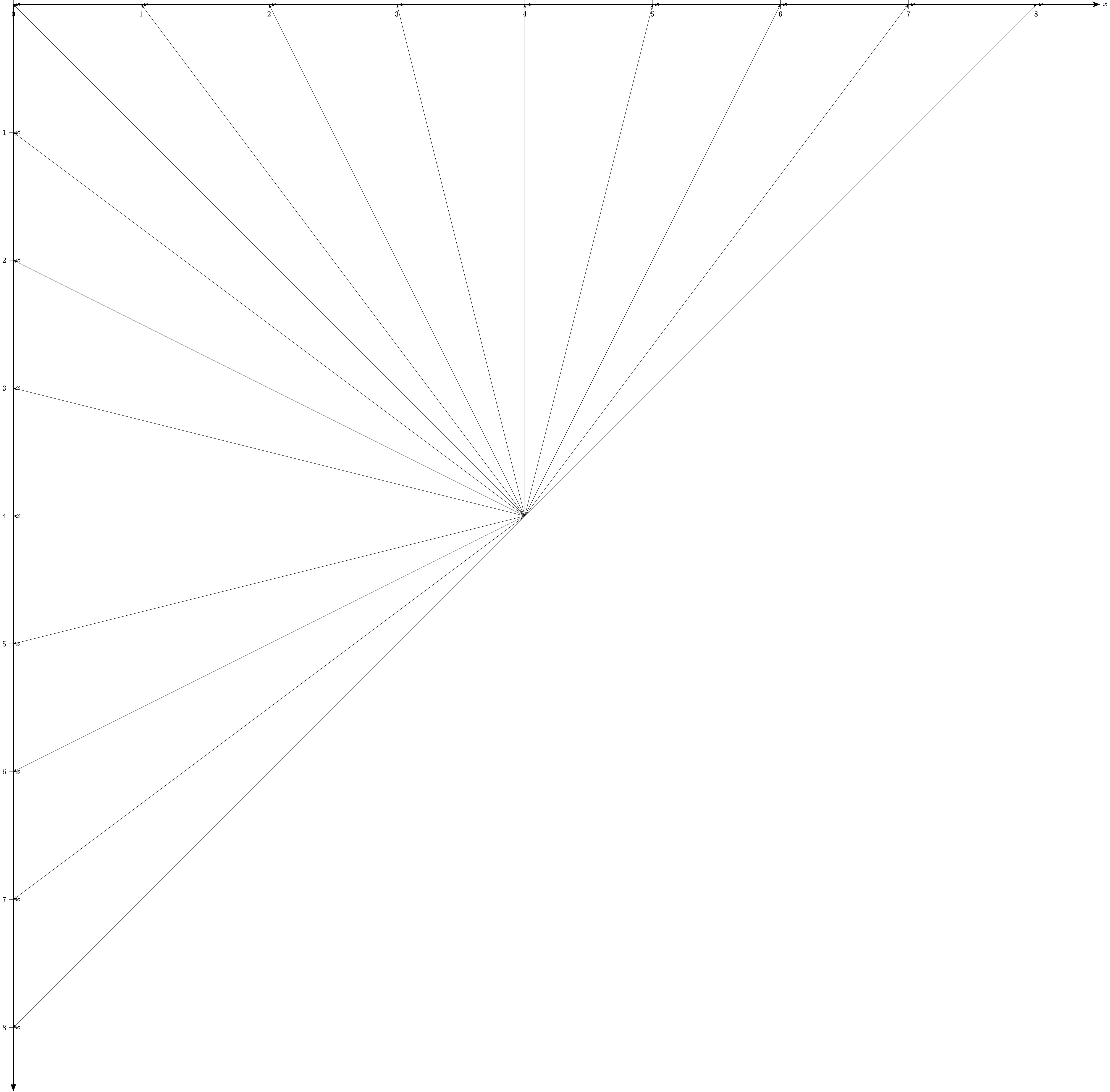
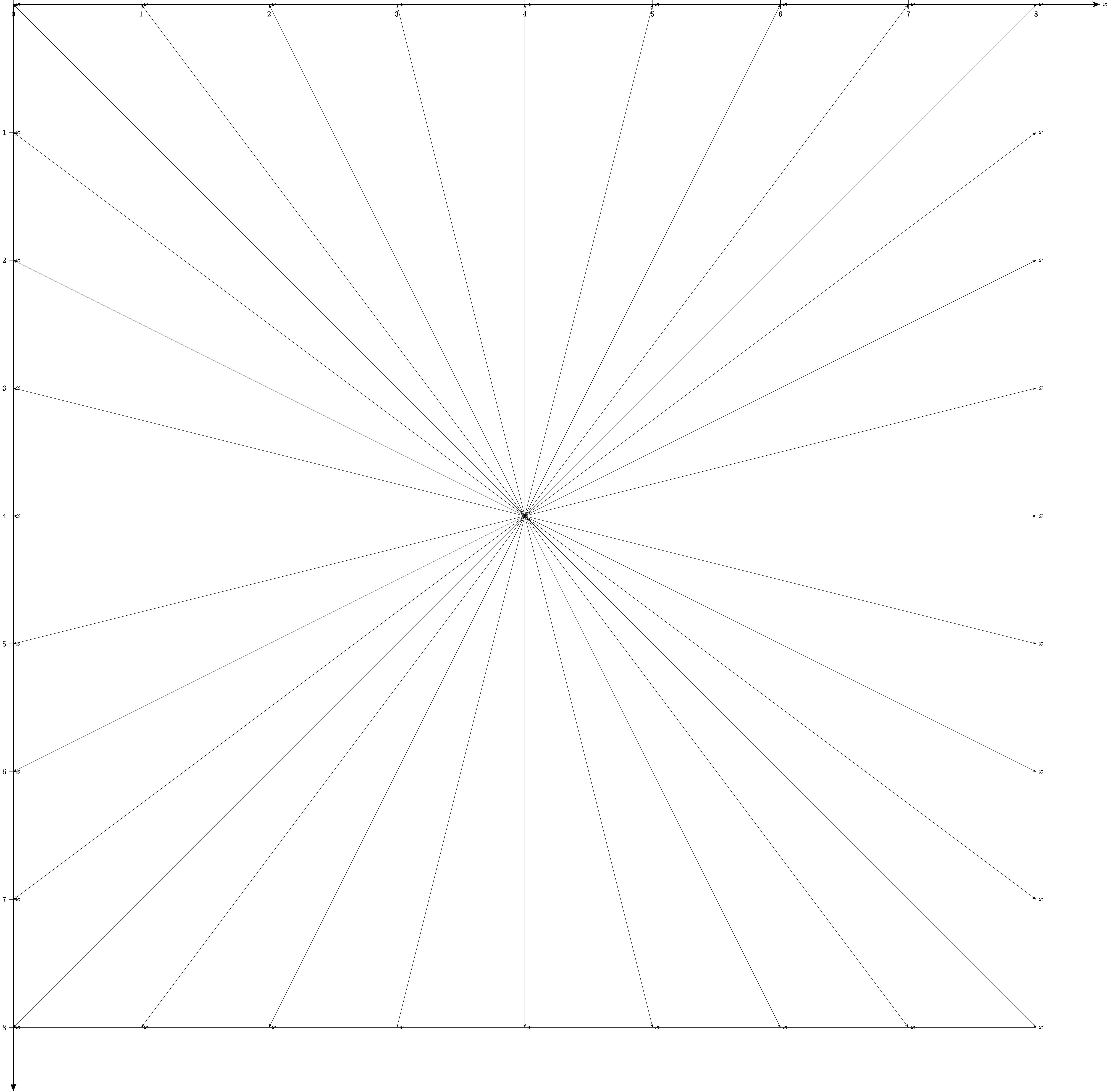
当采样核为 时,我们取边界整数点出发过核心 的连线,加上对角线一起作为分组分割线。 由任意两条相邻分割线间的夹角,构成以核心为原点的角度分组。 所以, 代表的正是分割线角度。因此,当不区分夹角及其对角方向时,中心角能够分为 组,称为 无符号梯度(Unsigned Gradient) 分组。当考虑夹角与对角方向互反时,中心角能够分为 组,称为 有符号梯度(Signed Gradient) 分组。
采样核一般为 大小,此时无符号梯度以方向标记,可分为 组即:
而有符号梯度则可分为 组:
以无符号梯度的 组分组为例,统计只需累计入组即可:
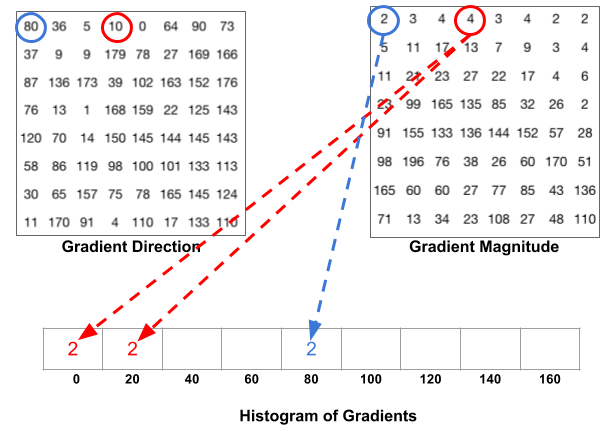
图 3-5 核大小 8x8 的无符号梯度(Unsigned Gradient)分组示意图
随后依次统计分组的采样核内数据。上图数据统计结果如下(概略图):
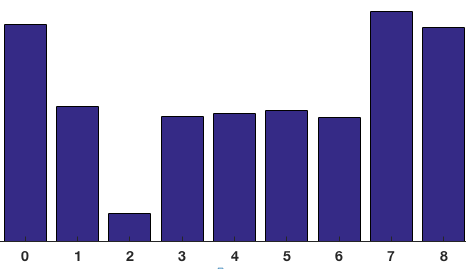
图 3-6 无符号梯度分组的单组采样核内统计结果示意直方图
统计完毕时,特征向量 随即生成完毕。我们以 表示分组的特征向量,在方向 上的强度大小(即此方向矢量的秩),则对于无符号梯度(Unsigned Gradient)分组:
同样,对有符号梯度(Signed Gradient)分组:
至此,完成分组提炼。
这种对数据梯度的蒸馏手段非常重要,因为它不只可以运用于物体识别等情况的中间步骤,也可以被运用于粗糙的运动特征检测。
而从分组的数据得来的分组特征,还需要归一化才能被有效使用。
块归一化
由于分组内梯度矢量的分解叠加有可能会使某个方向上的梯度强度 远超其他方向,因而造成该方向上的灰度(光亮度)变化会极大的影响结果。 这样的影响当然是有利的,但无法相对统一的权重,也会给处理带来大量的不确定性。 如图例:
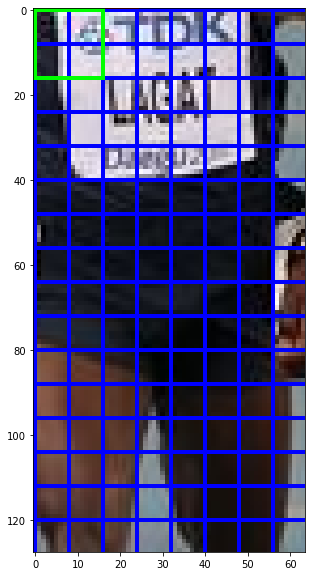
图 3-7 块归一化说明图例(数据源)
取绿色框中以 采样核,经过前几步以无符号梯度(Unsigned Gradient)方式处理,会得到的四个分组:
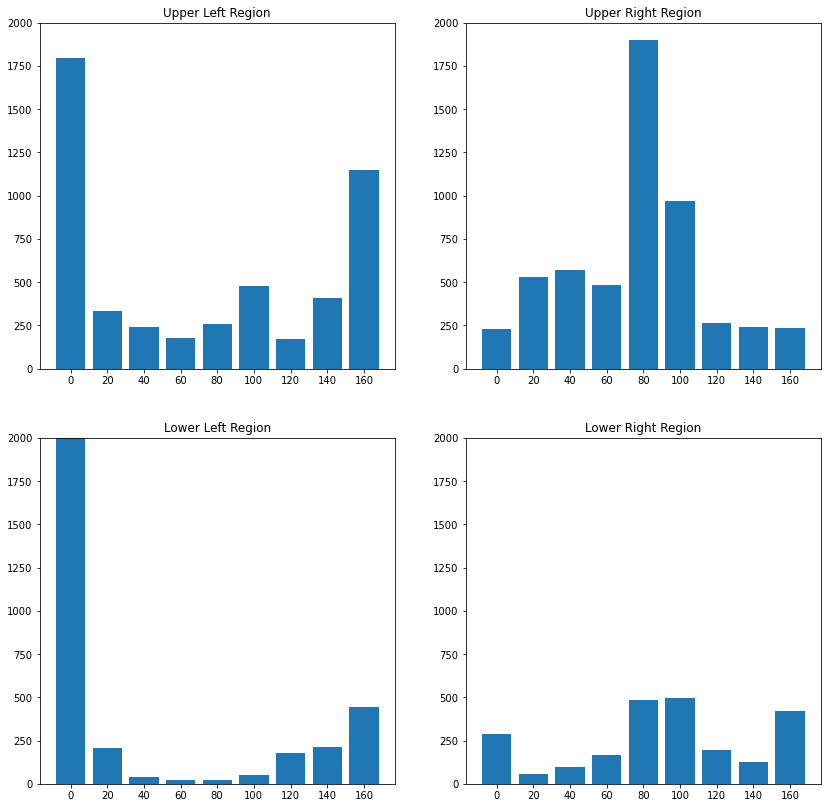
图 3-8 图例(数据源)绿色框中四个分组特征向量直方图表示
如果能够将这种变化趋势原封不动的保存下来,并缩小尺度到统一标准,就可以实现即保证特征不被不必要的削减,也有足够一致的度量衡。 因此,归一化就是解决办法。
归一化(Normalization) 是将目标数据集,按照总体权重等比放缩到指定区间范围的一种数学工具。通常我们选取当前采样分组包含的数据,即为归一化的目标数据集。组与组间独立归一化。但 块归一化(Block Normalization) 和一般情况下不完全一样,是以 块(Block) 为样本源而非 组(Cell) 样本源本身,来进行归一化处理的。
什么是块(Block)呢?
块(Block)是对于由一系列分组(Cell)按照一定规则(例如四叉树、标准单元等)组合构成的分组并集单元的称谓。 是组的集合。对块的分法有各种形式,但在方向梯度直方图中,使用的是一种直接切入的固定设置。记块大小为 ,块的最小单位为组,则取 的固定大小组采样,构成 HOG 的分块。即图例中的绿色方块:
图 3-9 图例(数据源)块划分单一块示意图
同分组一样,分块的目的也是为了更好的将特征数据进行汇总。只不过分块时的基础单元,从分组时的像素梯度矢量,变为了分组特征向量。记分块为 ,分块特征向量为 。仍以 表示归一化操作,有:
可见,在 大小的固定分块下,分块特征向量 的维度即为分组特征向量方向的 倍,即 。如果我们采用 L-2 归一化(即 L2范数)处理,记归一化因子为 ,则:
那么,对图例中的分组进行块归一化到 区间,所得如下:
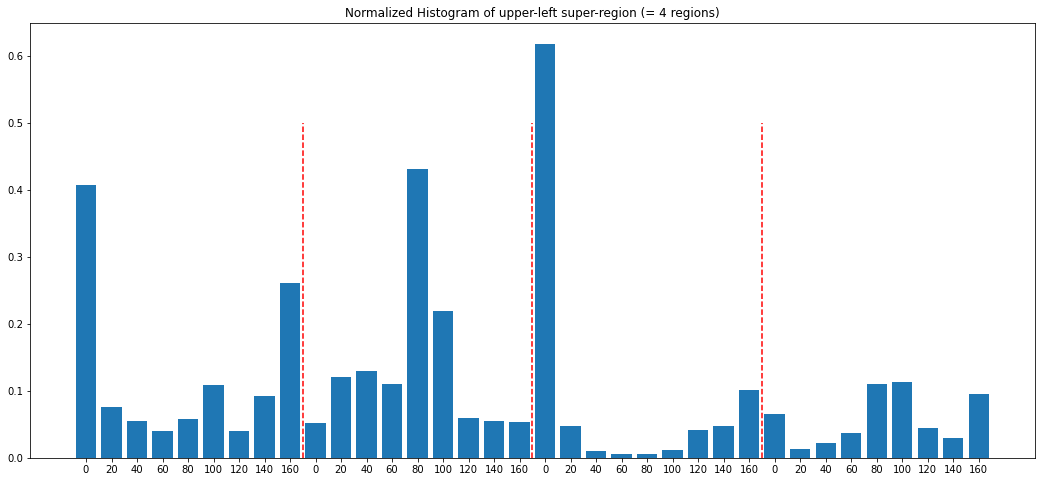
图 3-10 图例(数据源)绿色框对应块的块归一化特征向量结果
之后,按照块大小为步长,对全图分块计算即可得到输入图片的方向梯度直方图运算结果。达成对图片整体和分块区域的运动检测目的。
那么,在具体实践中是怎么做的呢?
同前文中对滤波的处理方法类似,对于此类存在核操作流的方法论,为了充分利用 GPU 并行计算能力,通用思路仍然是抽象为可执行的渲染程序片来交由 GPU 加速。
以索贝尔梯度计算 HOG 的 GLSL 渲染程序片
现在,我们可以依据理论来做 GPU 的动态管线程序片封装。
首先,我们需要定义 顶点程序片(Vertex Shader)。通过该程序片指定 GPU 的绘制区域,以及纹理与物体的点位映射。由于我们是对整个视窗界面进行处理,所以可以采用对传入的顶点数据进行坐标变换的方式,来求得顶点映射的纹理坐标,减少少量数据通信:
attribute vec3 position;
varying vec4 fs_position;
varying vec2 fs_texcoord;
void main()
{
fs_position = vec4(position.x, position.y, position.z, 1.0);
fs_texcoord = (position.xy + vec2(1.0, 1.0)) / 2.0;
gl_Position = fs_position;
}
程序化 HOG 的关键处理部分,依旧在 像素程序片(Pixel Shader/Fragment Shader) 上。相比之前对于滤波算法的实现,这里 显然复杂得多 :
precision mediump float;
const float PI = 3.1415927;
const int n = 8;
const int N = 2;
const int SIZE_CV = (n + 1);
const int SIZE_BV = /*N * N **/ SIZE_CV; // for orientation weight sum
const float ANGLE_GAP = 20.0 * PI / 180.0;
const vec3 ANGLE_0 = vec3(cos(ANGLE_GAP * 0.0), sin(ANGLE_GAP * 0.0), 100); // x=cos y=sin z=cot
const vec3 ANGLE_20 = vec3(cos(ANGLE_GAP * 1.0), sin(ANGLE_GAP * 1.0), 2.74747742);
const vec3 ANGLE_40 = vec3(cos(ANGLE_GAP * 2.0), sin(ANGLE_GAP * 2.0), 1.19175359);
const vec3 ANGLE_60 = vec3(cos(ANGLE_GAP * 3.0), sin(ANGLE_GAP * 3.0), 0.57735027);
const vec3 ANGLE_80 = vec3(cos(ANGLE_GAP * 4.0), sin(ANGLE_GAP * 4.0), 0.17632698);
const vec3 ANGLE_100 = vec3(cos(ANGLE_GAP * 5.0), sin(ANGLE_GAP * 5.0), -0.17632698);
const vec3 ANGLE_120 = vec3(cos(ANGLE_GAP * 6.0), sin(ANGLE_GAP * 6.0), -0.57735027);
const vec3 ANGLE_140 = vec3(cos(ANGLE_GAP * 7.0), sin(ANGLE_GAP * 7.0), -1.19175359);
const vec3 ANGLE_160 = vec3(cos(ANGLE_GAP * 8.0), sin(ANGLE_GAP * 8.0), -2.74747742);
const vec3 ANGLE_180 = vec3(cos(ANGLE_GAP * 9.0), sin(ANGLE_GAP * 9.0), -100);
const float CELL_TILE_SIZE = 8.0; //pixels
const float BLOCK_TILE_SIZE = 2.0; //cells
const float HOG_TILE_SIZE = 16.0; //pixels(n*N)
const float HOG_SHAFT_LENGTH = 14.0;
const float HOG_SHAFT_THICKNESS = 0.5;
const float HOG_SHAFT_HEAD_RATE = 64.0;
const vec3 HOG_COLOR = vec3(1.0, 1.0, 0.0);
const float HOG_MIN_MAGNITUDE = 0.1;
varying vec4 fs_position;
varying vec2 fs_texcoord;
uniform bool only_edge;
uniform vec2 pixel_bias;
uniform mat3 sobel_matrix_x;
uniform mat3 sobel_matrix_y;
uniform float hog_magnitude_limit;
uniform sampler2D target_texture;
/* Simple Grey */
float grey(vec3 c)
{
return 0.299 * c[0] + 0.587 * c[1] + 0.114 * c[2];
}
/* Calucate HOG Orient-hog Density (pixel by pixel) */
float hog_density(vec2 target_coord, vec3 field_vector) {
vec2 ori_pos = target_coord.xy / pixel_bias;
vec2 tile_center = (floor(ori_pos / HOG_TILE_SIZE) + 0.5) * HOG_TILE_SIZE;
float magnitude = abs(field_vector.z);
if (magnitude > max(HOG_MIN_MAGNITUDE, hog_magnitude_limit)) {
float distance = clamp(magnitude * HOG_SHAFT_LENGTH, 0.1, HOG_SHAFT_LENGTH);
vec2 normalizer = normalize(field_vector.xy);
vec2 tile_offset = ori_pos - tile_center;
float density = HOG_SHAFT_THICKNESS / HOG_SHAFT_HEAD_RATE - max(
abs(dot(tile_offset, vec2(+normalizer.y, -normalizer.x))),
abs(dot(tile_offset, vec2(+normalizer.x, +normalizer.y))) - distance
);
return clamp(1.0 + density, 0.0, 1.0);
}
return 0.0;
}
/* Calucate Sobel Field at target center */
vec3 sobel_edge_detection(vec2 target_coord) {
float gradient_center_x;
float gradient_center_y;
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 3; j++) {
vec2 bias = vec2(i-1, j-1) * pixel_bias;
vec4 color_sample = texture2D(target_texture, fs_texcoord.xy + bias);
float check_grey = grey(color_sample.rgb);
gradient_center_x += check_grey * sobel_matrix_x[i][j];
gradient_center_y += check_grey * sobel_matrix_y[i][j];
}
}
// float rectangle = (atan(gradient_center_y, gradient_center_x) + 2.0 * PI) / (PI);
vec2 orientate = vec2(gradient_center_x, gradient_center_y);
float magnitude = length(orientate);
return vec3(orientate, magnitude);
}
/* Calucate Cell Feature at target center */
mat3 cell_feature_extraction(vec2 target_coord) {
mat3 result;
float bias_unit = float(n-1)/2.0;
vec2 ori_pos = target_coord.xy / pixel_bias;
vec2 cell_center = (floor(ori_pos / CELL_TILE_SIZE) + 0.5) * CELL_TILE_SIZE;
float normalization_factor = 0.0;
for (int i = 0; i < n; i++) {
for (int j = 0; j < n; j++) {
vec2 bias = vec2(float(i)-bias_unit, float(j)-bias_unit) * pixel_bias;
vec3 field_vector = sobel_edge_detection(cell_center.xy + bias);
float seek_to = (field_vector.x+ 0.0001) / (field_vector.y + 0.0001) ;
float wight = 0.0;
float wight_as = 0.0;
{
wight = field_vector[2] * wight_as;
if (ANGLE_0.z>= seek_to && seek_to >= ANGLE_20.z){
wight_as = abs((seek_to - ANGLE_0.z)/(ANGLE_20.z - ANGLE_0.z));
result[0][0] += field_vector[2] *wight_as;
result[0][1] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_20.z>= seek_to && seek_to >= ANGLE_40.z){
wight_as = abs((seek_to - ANGLE_20.z)/(ANGLE_40.z - ANGLE_20.z));
result[0][1] += field_vector[2] * wight_as;
result[0][2] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_40.z>= seek_to && seek_to >= ANGLE_60.z){
wight_as = abs((seek_to - ANGLE_40.z)/(ANGLE_60.z - ANGLE_40.z));
result[0][2] += field_vector[2] * wight_as;
result[1][0] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_60.z>= seek_to && seek_to >= ANGLE_80.z){
wight_as = abs((seek_to - ANGLE_60.z)/(ANGLE_80.z - ANGLE_60.z));
result[1][0] += field_vector[2] * wight_as;
result[1][1] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_80.z>= seek_to && seek_to >= ANGLE_100.z){
wight_as = abs((seek_to - ANGLE_80.z)/(ANGLE_100.z - ANGLE_80.z));
result[1][1] += field_vector[2] * wight_as;
result[1][2] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_100.z>= seek_to && seek_to >= ANGLE_120.z){
wight_as = abs((seek_to - ANGLE_100.z)/(ANGLE_120.z - ANGLE_100.z));
result[1][2] += field_vector[2] * wight_as;
result[2][0] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_120.z>= seek_to && seek_to >= ANGLE_140.z){
wight_as = abs((seek_to - ANGLE_120.z)/(ANGLE_140.z - ANGLE_120.z));
result[2][0] += field_vector[2] * wight_as;
result[2][1] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_140.z>= seek_to && seek_to >= ANGLE_160.z){
wight_as = abs((seek_to - ANGLE_140.z)/(ANGLE_160.z - ANGLE_140.z));
result[2][1] += field_vector[2] * wight_as;
result[2][2] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_160.z>= seek_to && seek_to >= ANGLE_180.z){
wight_as = abs((seek_to - ANGLE_160.z)/(ANGLE_180.z - ANGLE_160.z));
result[2][2] += field_vector[2] * wight_as;
result[0][0] += field_vector[2] * (1.0 - wight_as);
}
}
}
}
return result;
}
/* Calucate Block Feature at target center */
float block_feature_extraction(vec2 target_coord) {
float orient_hog_density = 0.0;
float block_feature_vector[SIZE_BV];
vec2 cell_bias = vec2(n, n) * pixel_bias;
mat3 cell_lt = cell_feature_extraction(target_coord);
mat3 cell_rt = cell_feature_extraction(target_coord + vec2(cell_bias.x, 0.0));
mat3 cell_lb = cell_feature_extraction(target_coord + vec2(0.0, cell_bias.y));
mat3 cell_rb = cell_feature_extraction(target_coord + cell_bias);
float normalization_factor = 0.0;
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 3; j++) {
normalization_factor += cell_lt[i][j] + cell_rt[i][j] + cell_lb[i][j] + cell_rb[i][j];
block_feature_vector[i*3+j] = cell_lt[i][j] + cell_rt[i][j] + cell_lb[i][j] + cell_rb[i][j];
// block_feature_vector[i*3+j+SIZE_CV*0] = cell_lt[i][j];
// block_feature_vector[i*3+j+SIZE_CV*1] = cell_rt[i][j];
// block_feature_vector[i*3+j+SIZE_CV*2] = cell_lb[i][j];
// block_feature_vector[i*3+j+SIZE_CV*3] = cell_rb[i][j];
}
}
for (int i = 0; i < SIZE_BV; i++) {
// block_feature_vector[i] = block_feature_vector[i] / normalization_factor;
vec3 field_vector;
int at = int(mod(float(i) , 9.0));
float weight = block_feature_vector[i] / normalization_factor;
if (at == 0){
field_vector = vec3(ANGLE_0.xy, weight);
} else if (at == 1){
field_vector = vec3(ANGLE_20.xy, weight);
} else if (at == 2){
field_vector = vec3(ANGLE_40.xy, weight);
} else if (at == 3){
field_vector = vec3(ANGLE_60.xy, weight);
} else if (at == 4){
field_vector = vec3(ANGLE_80.xy, weight);
} else if (at == 5){
field_vector = vec3(ANGLE_100.xy, weight);
} else if (at == 6){
field_vector = vec3(ANGLE_120.xy, weight);
} else if (at == 7){
field_vector = vec3(ANGLE_140.xy, weight);
} else if (at == 8){
field_vector = vec3(ANGLE_160.xy, weight);
}
orient_hog_density += hog_density(target_coord, field_vector);
}
return orient_hog_density;
}
void main()
{
vec3 output_ = only_edge? vec3(0) : texture2D(target_texture, fs_texcoord.xy).rgb;
float orient_hog_density = block_feature_extraction(fs_texcoord.xy);
vec3 hogs_ = orient_hog_density * HOG_COLOR;
gl_FragColor = vec4(output_ + hogs_, 1.0);
}
样例采用 单一流水线过程,我们将几个关键流程节点封装为方法,实现了 HOG 的处理。相对于顶点程序片,像素程序片不太容易理解,还需分步拆开解读。
HOG 片元着色器(Fragment Shader)的细节拆解
首先需要在处理前,进行一部分方法和常量准备。这些 前置工作包含两个部分。
第一部分由纯常量构成。用于辅助实现 方向梯度直方图(HOG)算法 中,各个步骤所使用到的关键恒定参数,有:
const float PI = 3.1415927;
const int n = 8;
const int N = 2;
const int SIZE_CV = (n + 1);
const int SIZE_BV = /*N * N **/ SIZE_CV; // for orientation weight sum
const float ANGLE_GAP = 20.0 * PI / 180.0;
const vec3 ANGLE_0 = vec3(cos(ANGLE_GAP * 0.0), sin(ANGLE_GAP * 0.0), 100); // x=cos y=sin z=cot
const vec3 ANGLE_20 = vec3(cos(ANGLE_GAP * 1.0), sin(ANGLE_GAP * 1.0), 2.74747742);
const vec3 ANGLE_40 = vec3(cos(ANGLE_GAP * 2.0), sin(ANGLE_GAP * 2.0), 1.19175359);
const vec3 ANGLE_60 = vec3(cos(ANGLE_GAP * 3.0), sin(ANGLE_GAP * 3.0), 0.57735027);
const vec3 ANGLE_80 = vec3(cos(ANGLE_GAP * 4.0), sin(ANGLE_GAP * 4.0), 0.17632698);
const vec3 ANGLE_100 = vec3(cos(ANGLE_GAP * 5.0), sin(ANGLE_GAP * 5.0), -0.17632698);
const vec3 ANGLE_120 = vec3(cos(ANGLE_GAP * 6.0), sin(ANGLE_GAP * 6.0), -0.57735027);
const vec3 ANGLE_140 = vec3(cos(ANGLE_GAP * 7.0), sin(ANGLE_GAP * 7.0), -1.19175359);
const vec3 ANGLE_160 = vec3(cos(ANGLE_GAP * 8.0), sin(ANGLE_GAP * 8.0), -2.74747742);
const vec3 ANGLE_180 = vec3(cos(ANGLE_GAP * 9.0), sin(ANGLE_GAP * 9.0), -100);
const float CELL_TILE_SIZE = 8.0; //pixels
const float BLOCK_TILE_SIZE = 2.0; //cells
第二部分则包含常量和辅助方法。用于辅助 HOG 最终结果的图像化显示,有:
const float CELL_TILE_SIZE = 8.0; //pixels
const float BLOCK_TILE_SIZE = 2.0; //cells
const float HOG_TILE_SIZE = 16.0; //pixels(n*N)
const float HOG_SHAFT_LENGTH = 14.0;
const float HOG_SHAFT_THICKNESS = 0.5;
const float HOG_SHAFT_HEAD_RATE = 64.0;
const vec3 HOG_COLOR = vec3(1.0, 1.0, 0.0);
const float HOG_MIN_MAGNITUDE = 0.1;
/* Simple Grey */
float grey(vec3 c)
{
return 0.299 * c[0] + 0.587 * c[1] + 0.114 * c[2];
}
/* Calucate HOG Orient-hog Density (pixel by pixel) */
float hog_density(vec2 target_coord, vec3 field_vector) {
vec2 ori_pos = target_coord.xy / pixel_bias;
vec2 tile_center = (floor(ori_pos / HOG_TILE_SIZE) + 0.5) * HOG_TILE_SIZE;
float magnitude = abs(field_vector.z);
if (magnitude > max(HOG_MIN_MAGNITUDE, hog_magnitude_limit)) {
float distance = clamp(magnitude * HOG_SHAFT_LENGTH, 0.1, HOG_SHAFT_LENGTH);
vec2 normalizer = normalize(field_vector.xy);
vec2 tile_offset = ori_pos - tile_center;
float density = HOG_SHAFT_THICKNESS / HOG_SHAFT_HEAD_RATE - max(
abs(dot(tile_offset, vec2(+normalizer.y, -normalizer.x))),
abs(dot(tile_offset, vec2(+normalizer.x, +normalizer.y))) - distance
);
return clamp(1.0 + density, 0.0, 1.0);
}
return 0.0;
}
灰度(光亮度)值采用 BT.601 的狭隘区间(Narrow Range) 标准快速计算,运用中也可以替换为均值(部分场景)或根据情况更换其他标准( 如 RGB数据 非采样得原始数据的标准原色格式而来,则因根据转换前的传输格式来选择配套的规格,见上一章)。
注意以 HOG_[xx] 为格式的常量。这些常量被用于计算,上屏显示的无符号梯度(Unsigned Gradient)对应方向上的权重柱形轴。 柱形轴过分块中心,轴的长度和颜色的深浅(即能量密度)代表归一化后的权重大小。而方法计算所得 density 则为当前像素点对应块内位置的能量密度值。显然,密度值只有在轴方向上才存在有效值。另一方面,较小的能量密度也不具有代表性,需要通过 阈值限定进行过滤,此处采用 max(HOG_MIN_MAGNITUDE, hog_magnitude_limit) 进行设置。
准备完成后,就该正式流程的处理了。这里的封装思路,是以 生成的最小结果单元为分割依据 进行的。所以,将 HOG 步骤方法封为一下三个:
- sobel_edge_detection 针对 像素点(Pixel)梯度矢量 的 索贝尔边界检测
/* Calucate Sobel Field at target center */
vec3 sobel_edge_detection(vec2 target_coord) {
float gradient_center_x;
float gradient_center_y;
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 3; j++) {
vec2 bias = vec2(i-1, j-1) * pixel_bias;
vec4 color_sample = texture2D(target_texture, fs_texcoord.xy + bias);
float check_grey = grey(color_sample.rgb);
gradient_center_x += check_grey * sobel_matrix_x[i][j];
gradient_center_y += check_grey * sobel_matrix_y[i][j];
}
}
// float rectangle = (atan(gradient_center_y, gradient_center_x) + 2.0 * PI) / (PI);
vec2 orientate = vec2(gradient_center_x, gradient_center_y);
float magnitude = length(orientate);
return vec3(orientate, magnitude);
}
- cell_feature_extraction 针对 分组(Cell)特征提取 为结果的 矢量统计合并
/* Calucate Cell Feature at target center */
mat3 cell_feature_extraction(vec2 target_coord) {
mat3 result;
float bias_unit = float(n-1)/2.0;
vec2 ori_pos = target_coord.xy / pixel_bias;
vec2 cell_center = (floor(ori_pos / CELL_TILE_SIZE) + 0.5) * CELL_TILE_SIZE;
float normalization_factor = 0.0;
for (int i = 0; i < n; i++) {
for (int j = 0; j < n; j++) {
vec2 bias = vec2(float(i)-bias_unit, float(j)-bias_unit) * pixel_bias;
vec3 field_vector = sobel_edge_detection(cell_center.xy + bias);
float seek_to = (field_vector.x+ 0.0001) / (field_vector.y + 0.0001) ;
float wight = 0.0;
float wight_as = 0.0;
{
wight = field_vector[2] * wight_as;
if (ANGLE_0.z>= seek_to && seek_to >= ANGLE_20.z){
wight_as = abs((seek_to - ANGLE_0.z)/(ANGLE_20.z - ANGLE_0.z));
result[0][0] += field_vector[2] *wight_as;
result[0][1] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_20.z>= seek_to && seek_to >= ANGLE_40.z){
wight_as = abs((seek_to - ANGLE_20.z)/(ANGLE_40.z - ANGLE_20.z));
result[0][1] += field_vector[2] * wight_as;
result[0][2] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_40.z>= seek_to && seek_to >= ANGLE_60.z){
wight_as = abs((seek_to - ANGLE_40.z)/(ANGLE_60.z - ANGLE_40.z));
result[0][2] += field_vector[2] * wight_as;
result[1][0] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_60.z>= seek_to && seek_to >= ANGLE_80.z){
wight_as = abs((seek_to - ANGLE_60.z)/(ANGLE_80.z - ANGLE_60.z));
result[1][0] += field_vector[2] * wight_as;
result[1][1] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_80.z>= seek_to && seek_to >= ANGLE_100.z){
wight_as = abs((seek_to - ANGLE_80.z)/(ANGLE_100.z - ANGLE_80.z));
result[1][1] += field_vector[2] * wight_as;
result[1][2] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_100.z>= seek_to && seek_to >= ANGLE_120.z){
wight_as = abs((seek_to - ANGLE_100.z)/(ANGLE_120.z - ANGLE_100.z));
result[1][2] += field_vector[2] * wight_as;
result[2][0] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_120.z>= seek_to && seek_to >= ANGLE_140.z){
wight_as = abs((seek_to - ANGLE_120.z)/(ANGLE_140.z - ANGLE_120.z));
result[2][0] += field_vector[2] * wight_as;
result[2][1] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_140.z>= seek_to && seek_to >= ANGLE_160.z){
wight_as = abs((seek_to - ANGLE_140.z)/(ANGLE_160.z - ANGLE_140.z));
result[2][1] += field_vector[2] * wight_as;
result[2][2] += field_vector[2] * (1.0 - wight_as);
} else if (ANGLE_160.z>= seek_to && seek_to >= ANGLE_180.z){
wight_as = abs((seek_to - ANGLE_160.z)/(ANGLE_180.z - ANGLE_160.z));
result[2][2] += field_vector[2] * wight_as;
result[0][0] += field_vector[2] * (1.0 - wight_as);
}
}
}
}
return result;
}
- block_feature_extraction 针对 分块(Block)特征提取 为结果的 块归一化
/* Calucate Block Feature at target center */
float block_feature_extraction(vec2 target_coord) {
float orient_hog_density = 0.0;
float block_feature_vector[SIZE_BV];
vec2 cell_bias = vec2(n, n) * pixel_bias;
mat3 cell_lt = cell_feature_extraction(target_coord);
mat3 cell_rt = cell_feature_extraction(target_coord + vec2(cell_bias.x, 0.0));
mat3 cell_lb = cell_feature_extraction(target_coord + vec2(0.0, cell_bias.y));
mat3 cell_rb = cell_feature_extraction(target_coord + cell_bias);
float normalization_factor = 0.0;
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 3; j++) {
normalization_factor += cell_lt[i][j] + cell_rt[i][j] + cell_lb[i][j] + cell_rb[i][j];
block_feature_vector[i*3+j] = cell_lt[i][j] + cell_rt[i][j] + cell_lb[i][j] + cell_rb[i][j];
// block_feature_vector[i*3+j+SIZE_CV*0] = cell_lt[i][j];
// block_feature_vector[i*3+j+SIZE_CV*1] = cell_rt[i][j];
// block_feature_vector[i*3+j+SIZE_CV*2] = cell_lb[i][j];
// block_feature_vector[i*3+j+SIZE_CV*3] = cell_rb[i][j];
}
}
for (int i = 0; i < SIZE_BV; i++) {
// block_feature_vector[i] = block_feature_vector[i] / normalization_factor;
vec3 field_vector;
int at = int(mod(float(i) , 9.0));
float weight = block_feature_vector[i] / normalization_factor;
if (at == 0){
field_vector = vec3(ANGLE_0.xy, weight);
} else if (at == 1){
field_vector = vec3(ANGLE_20.xy, weight);
} else if (at == 2){
field_vector = vec3(ANGLE_40.xy, weight);
} else if (at == 3){
field_vector = vec3(ANGLE_60.xy, weight);
} else if (at == 4){
field_vector = vec3(ANGLE_80.xy, weight);
} else if (at == 5){
field_vector = vec3(ANGLE_100.xy, weight);
} else if (at == 6){
field_vector = vec3(ANGLE_120.xy, weight);
} else if (at == 7){
field_vector = vec3(ANGLE_140.xy, weight);
} else if (at == 8){
field_vector = vec3(ANGLE_160.xy, weight);
}
orient_hog_density += hog_density(target_coord, field_vector);
}
return orient_hog_density;
}
考虑到思路连贯性,样例中的实现将所有步骤放在一张纹理过程中处理,且没有对核计算做优化。这会导致每个像素都存在一次 HOG 计算金字塔,而按理来说 一个块内并不需要重复计算。样例中相当于将块内运算重复了 次,极大的增加了消耗。
因此,在实际应用中,需要对上文的实现进行改造。 把文中程序片内的各个步骤的方法,分配到不同阶的程序片中,并优化纹理过程。 之后才能被更为高效的予以运用。介于骨干并无不同,此处就不再展开赘述。
经过处理后的最终结果,以能量密度的形式附加到当前像素点的色彩值上,实现最终的图形化展示:
void main()
{
vec3 output_ = only_edge? vec3(0) : texture2D(target_texture, fs_texcoord.xy).rgb;
float orient_hog_density = block_feature_extraction(fs_texcoord.xy);
vec3 hogs_ = orient_hog_density * HOG_COLOR;
gl_FragColor = vec4(output_ + hogs_, 1.0);
}
现在,整个 HOG 的简易程序片就完成了。
到此为止,方向梯度直方图技术可以初步应用于音视频当中了。 虽然在上文样例的渲染程序片实现过程中,但从普遍意义上来讲,HOG 仍然属于相对高消耗的算法, HOG 提供的方法论更多被应用在 编解码规格制定的时域冗余处理 上。其本身具有一定的 硬件门槛。
HOG 最终产物的用处
假设输入帧长宽为 。按照前文采用块大小 ,分组大小 进行处理,则得到方向梯度直方图最终输出结果为包含 个块特征向量的数据集合。每一个块特征向量由 维(参数)构成。为了方便描述,我们将输出数据集称为 HOG 数据帧。
HOG 数据帧(HOG Frame)更多被作为经过特征提取后的预处理输入数据,传入目标物体检测等人工智能计算机视觉方向的算法模型。 通过模型获取的物体识别结果后,再利用训练好的目标跟踪模型,或传统目标跟踪算法(诸如:核卷积滤波(KCF [Kernelized Correlation Filter])[18] 、MOSSE 算法等)等,来获取视频流中运动物体在时序上的关联性。
那么,用于判断目标检测结果是否准确的方法,也就是目标检测模型的 损失函数(Loss Function) 是什么呢?